
무인 운반차(AGV) 또는 자율 운반차는 상품 및 상품 운송을 위한 작업을 수행합니다. 이러한 운송에는 차량에 대한 높은 요구 사항이 필요합니다. 열악한 환경 조건, 배터리 시스템의 효율성, 가변 하중, 오르막과 내리막 경사, 사람과의 상호작용 등이 이러한 차량이 직면하는 몇 가지 과제입니다. 컴퓨터로 제어되고 바퀴를 기반으로 하는 AGV는 탑승 작업자나 운전자 없이 시설의 바닥을 따라 이동합니다. 소프트웨어와 센서 기반 안내 시스템의 조합에 의해 움직입니다. 이러한 시스템의 경우 차량의 성공적인 작동을 위해서는 효과적인 motion control 매우 중요합니다. 한 선도적인 글로벌 AGV 및 자재 흐름 시스템 공급업체가 최신 AGV 모델을 업그레이드하고자 할 때 Elmo 선택했습니다.
이 사례 연구를 읽고 방법을 알아보세요:
- 강력한 고밀도 골드 서보 드라이브는 시스템이 다양한 하중을 전환해야 할 때 motion control 가능하게 합니다.
- 컴팩트한 장비는 까다로운 공간 요건에도 적합합니다.
- Elmo솔루션은 시스템이 꺼지는 원인이 되었던 오랜 문제를 해결했습니다.
- Elmo고급 갠트리 솔루션은 PWM 레벨에서 드라이브의 원활한 동기화를 보장합니다.

머신 요구 사항
대상 차량은 소형 트럭으로 재고/창고에서 조립 라인까지 부품을 운반하기 위해 설계되었으며 적재 중량은 100kg에서 1.2톤까지 다양했습니다. 이 차량은 3교대로 운영되며 조립 라인으로 제품을 안전하게 운송해야 합니다.
이 고객의 기존 AGV는 하중과 속도가 다르면 리프팅 시스템의 허브가 정렬되지 않아 모션 컨트롤러가 시스템을 꺼버리는 등 심각한 효율 저하와 가동 중단 문제를 겪었습니다. 이러한 문제로 인해 이 회사는 AGV의 리프트 테이블을 다시 설계하기로 결정했습니다. 시스템을 업그레이드하는 것은 허브 시스템의 컴팩트한 디자인을 고려할 때 어려운 과제였습니다. 새로운 설계에서는 케이블을 줄이고, 리미트 스위치를 위한 I/O를 지원해야 했을 뿐만 아니라 각 드라이브에 대해 48VDC에서 약 30A RMS의 높은 전력 밀도가 필요했습니다.
Motion control 솔루션이 포함되어 있습니다:
- Gold Solo Twitter 드라이브
리프팅 시스템은 비선형 스핀들을 구동하는 기어 박스와 앱솔루트 엔코더가 있는 두 개의 독립적인 영구 자석 동기식 (PMSM/BLDC) 모터로 구성된 시저 허브 시스템이었습니다. 두 독립 시스템은 모두 기계식이며 팔레트 캐리어로 연결되고 스핀들이 허브를 들어 올립니다.
리프트 테이블의 양쪽 시저가 동시에 작동하여 테이블 플레이트가 수평 위치를 지속적으로 유지해야 하기 때문에 Elmo내장형 갠트리 기능이 올바른 솔루션으로 고객에게 제안되었습니다. 갠트리 솔루션은 두 시저의 동기화, 위치 결정의 안정성 및 정확성과 관련하여 리프트 테이블의 성능을 크게 향상시켰을 뿐만 아니라 두 모터의 동기화가 이제 Gold Solo Twitters에서 수행되고 CANopen 마스터는 하나만 명령하면 되기 때문에 CANopen 마스터 측의 제어 노력을 크게 줄였습니다. Gold Solo Twitter하나만 명령하면 되었기 때문에 갠트리 마스터 역할을 했습니다.
Two Gold Solo Twitter 서보 드라이브 두 개를 마스터와 슬레이브로 구성하여 소형 허브에 설치하여 모터를 제어했습니다. 통신은 필드버스 시스템에 과부하를 주지 않고 내부 통신 인터페이스를 통해 이루어집니다. Elmo 모터 PWM 레벨에서 가능한 최고의 동기화를 사용합니다. 갠트리 시스템의 목표 위치 및 중심 제어 정확도는 1엔코더 단위(1 카운트)입니다. 이 갠트리 기능은 이미 ELMO 드라이브에 통합되어 있으므로 복잡한 프로그래밍이 필요하지 않습니다. 갠트리 모드와 동기화는 추가 트래픽으로 버스 대역폭에 영향을 미치지 않습니다. ELMO강력한 애플리케이션 스튜디오를 통해 간단하고 빠르게 구성할 수 있습니다, EASII.
AGV를 시뮬레이션하는 동안 Elmo 두 개의 드라이브로 갠트리 솔루션을 시연하고 테스트하여 두 드라이브의 원활한 병렬 실행과 시스템의 편차를 확인할 수 있었습니다. ElmoEASII 소프트웨어를 통해 드라이브를 빠르고 쉽게 설정할 수 있었고, 고객에게 시스템에서 발생할 수 있는 모든 장애를 보여주었습니다. 또한 Elmo 소프트웨어 팀이 마스터에서 서보 드라이브에 이르는 CAN 연결을 설정하는 데 도움을 주었습니다.
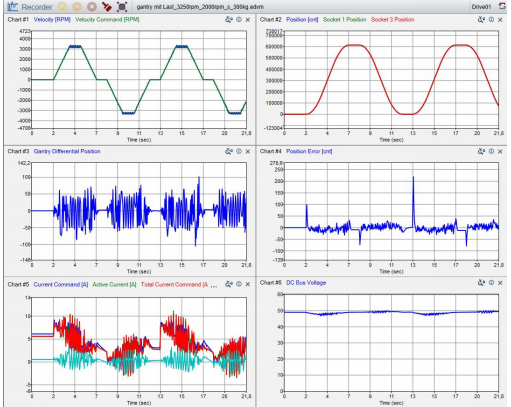
페이로드 300kg, 모터 속도 3250rpm, 가속/감속 3000rpm/s에서의 성능
Elmo엔지니어링 팀은 공간 요구를 더욱 줄이기 위해 엔코더 교체를 제안하고 고객이 멀티 엔코더 인터페이스에 적합한 파트너를 선택할 수 있도록 지원했습니다. 각 모터에 인크리멘탈 엔코더와 허브에 케이블 풀이 있는 앱솔루트 시스템 대신 모터 후면에 정류 및 위치 지정을 위한 Elmo 시스템을 권장하여 비용을 절감할 수 있도록 했습니다.
결과
포털 솔루션은 큰 비용과 변환 작업 없이도 훨씬 더 공간을 절약하고 분산된 방식으로 구현할 수 있으며 케이블링 작업도 줄일 수 있습니다. Elmo Motion Control 안정적으로 작동하고 빠르게 작동할 수 있는 PWM 레벨에서 드라이브를 동기화하여 비용 효율적이고 빠른 솔루션을 제공했습니다. Elmo동급 최고 성능 서보 드라이브를 AGV에 통합함으로써 차량의 작동이 크게 향상되었습니다. Elmo 드라이브의 최첨단 서보 제어 기술과 독자적인 갠트리 내장 기능 덕분에 Elmo 고객의 긴급한 문제를 최단 기간 내에 해결할 수 있는 최적의 솔루션을 제공할 수 있었습니다.

Gold Solo Twitter
NANO Servo Drive Up to 5600 Watts
Up to 50A/60V, 70A/100V, 35A/200V