A leading semiconductor equipment manufacturer is specializing in sub-micron die bonding and advanced SMD rework. They are a high performer in this industry for their multi-chip flexibility. They developed a fully automated die bonding machine picking up dies of wafers and performing bonding at high speed with extreme accuracy. The machine with an XY gantry stage, contains a total of 14 axes all of which are powered by Elmo to perform critical and high performance machine motion. Elmo’s Platinum Maestro is the master controller orchestrating all axes of motion.
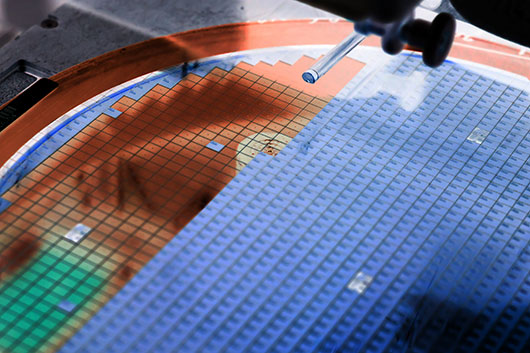
Bonding machines are automatic machines used in semiconductor fabrication to place together individual dies. During this process a gantry based system where wafers are being loaded to, picks up the dies and places them onto their destination.
Elmo has found a way to not only solve numerous existing motion challenges within the system, but also to improve its performances while doing so. One example is the air bearing gantry system with an XY stage that stabilizes the structure during the process and carries out the linear axes of motion. An air bearing system replaces the mechanical contacts of the stage with a thin air film to avoid friction and vibration. The stage then becomes a negligible friction platform that is highly valuable when motion is to be very accurate with fast acceleration. With that said, when it comes to emergency brake, such a system can be challenging since activating the STO safety function cannot cause a system with negligible friction to stop. Elmo has the capability to solve this challenge by using a drive based function called dynamic breaking, in which the phases of the motor are internally shorted by the drive to cause an emergency stop. With Elmo’s drives the regenerative energy caused by this stop is stored and later dissipated in the system.
When developing semiconductor equipment that needs to operate in cleanrooms it is important to make sure that while operating, the machine does not release particles to the air contaminating the cleanroom environment. In a gantry system, both linear axes of the staging are not always perfectly aligned and parallel. As a result a slight deviancy between the two motors is created and while they move together one might experience internal friction caused by uneven load. This friction releases particles to the air and contaminates the cleanroom environment. Thanks to Elmo Application Studio (EAS II) software and its advanced “Error Mapping” feature, the situation can be completely avoided. The EAS II determines the exact deviancy by creating look up tables that calculate the errors and correct them on the fly. By doing so, the motion becomes instantly equal, smooth and synchronized, which reduces drastically internal motor friction and contaminants into the air.
Elmo’s Platinum Maestro was chosen as the master controller to orchestrate all 14 axes of motion in the system. The Maestro’s versatile programing proficiencies allowed for the program to be written in C++ which can run on either the Maestro or on the host with win 32. The choice can be made with the press of a button and allows for flexibility and easier debugging. All 14 axes are synchronized over EtherCAT at a 1msec cycle with additional third party devices .The company developed their own communication protocol based on UDP to which Elmo’s Platinum Maestro adapted in order to communicate with the host.
Above the gantry bridge, seats the Z axis which is supported by the gantry’s structure and is responsible for the direct contact with the dies as it picks them up and places them on a substrate. This axis challenges were twofold: the first being the control of the exact force in which the dies are being handled to make sure they are not being damaged, and the second was the position indication. Since this application is camera based, the position is indicated by signals sent out from the host. Numerous signals can also be received on the fly, making the position of the axis adapt itself constantly during motion. For both of those challenges Elmo’s solution was based on its “Position to Force” feature. This mode allows for the Z axis to move from position mode to torque mode on the fly, and by that simultaneously positioning the axis at the exact location for pick up while controlling the amount of force at which it is handling the dies. As a result, Elmo’s solution made the process time to be significantly shorter which increased the overall throughput of the machine.
