
The Chosen Solution: Gold Whistle
The Chaos mobile robot from Autonomous Solutions is an autonomous tracked robotic platform designed for high mobility in areas with challenging terrain. It can carry a wide range of sensors and payloads.
The high mobility is a result of four tracked arms that provide both high speed and strength. Each tracked arm uses two motors: (1) for rotating the arm and (2) for track locomotion. The arm’s rotation allows the robot to change its posture, climb over obstacles, elevate its body, etc. and the tracks provide the locomotion and steering.
Read this case study to learn about:
- Implementing up to 1.6 kW of continuous power using a matchbox-sized servo drive.
- Maximizing your motor torque output with high current capability in a small form factor.
- Minimizing the weight of a mobile platform.
Machine Requirements
Autonomous Solutions’ main aims for the Chaos mobile robot were to:
- Increase the speed and strength of the platform for traversing terrain, carrying high payloads, and climbing over obstacles.
- Maintain the existing control architecture and communication protocol.
- Minimize the footprint of the design to reduce the weight and size of the enclosure where the drive sits.
The company needed a real-time distributed control system to control each tracked arm independently, allowing agility and versatility in steep, uneven, and loose terrain.

The Elmo Motion Control Solution included:
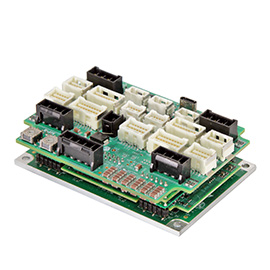
- 8 Gold Whistle servo drives G-WHI-20/100s
The Gold Whistle servo drives are installed at the juncture between the tracked arms and the robot body. Each tracked arm uses two Gold Whistle drives, both mounted on a PCB designed by Autonomous Solutions.
The company chose Elmo’s Whistle servo drive because of its extreme power density and CANopen compatibility in a lightweight and compact package. The Gold Whistle’s high power-output provides high arm torque and rapid changes of arm position to allow high agility under heavy loads. While moving across terrain, the Gold Whistle’s high power allows the robot to move at speed both on flat terrain and steep inclines.
The robot is controlled via CANopen in a distributed control system. The DS-402 protocol is used for motion control in addition to Elmo’s DS-301 binary interpreter. This allows the Gold Whistle’s proprietary command set to be used to enhance the motion control modes via the DS-402 protocol.
Compliance with standard communication protocols, which allowed Autonomous Solutions to re-use their existing control platform was an additional factor in the Gold Whistle’s favor.

The outcome
The Gold Whistle drives provide closed-loop motion control, feedback inputs, and communication support. Compliance with CANopen, the DS-301 communication protocol, and the DS-402 motion device protocol allows the pre-existing robot controller to provide high-level motion commands to the Gold Whistle. Additionally, manufacturer-specific CANopen implementations also allow for control and monitoring above and beyond what the standard protocols provide, without affecting compliance to standards.
Bret Turpin, Project Manager, Autonomous Solutions, noted that the ability of the Gold Whistle to handle both the extreme power requirements and the tight space requirements, “allowed us to take full advantage of the design, giving Chaos a carrying capacity of well over 45 kg (100 lbs) and a top speed that rivals any robot in its class, a significant improvement over the previous implementation. Product support was also excellent, with responses from Elmo’s engineers taking hours instead of days.”

Gold Whistle
Miniature Servo Drive
20A/100VDC, 9A/200VDC
Today’s Solution:
Elmo has introduced new solutions and options since this high mobility robot was designed. Today:
- The system could be controlled and operated via Elmo’s Platinum Maestro (PMAS) multi-axis network controller, through a wireless network from a centralized PLC or computer.
- Elmo’s unique “R” type servo drive would provide higher continuous current capabilities – ideal for high-inertia motion systems (such as AGVs) that may need high current for extended periods to overcome obstacles.
- Gold Twitter servo drives could be used instead of the Gold Whistle drives
- 2 Platinum Quartet drives could replace the 8 Gold Whistle drives
- An EtherCAT network could replace the CanOpen network
Gold Twitter
NANO Servo Drive Up to 5600 Watts
Up to 50A/60V, 70A/100V, 35A/200V
Platinum Solo Quartet
4X 5000W Servo Drive & Motion-Controller
Up to 25A/100V, 35/200V

Platinum Maestro
High Precision Ethercat Muilti-Axis Motion Controller