このケーススタディを読んで、その方法を学んでほしい:
- エラー訂正機能は、システムが最終目標である10nmの精度を達成するのに役立つ。
- ノッチファインダー機能により、最高回転速度でウェーハの位置決めが可能。
- 独自のオートフォーカス機能により、装置のスループットを向上させ、ウェーハをすでにフォーカスされた状態で測定ターゲットに到達させることができます。

機械要件
大手半導体検査機メーカーにとって、サーボ性能はシステムの中で最も厳しく重要な役割を担っている。システム分解能が1nmで、動的要件が厳しいため、このメーカーはユニークな特性を持つ革新的な高性能検査ステージを製造する必要がありました。既存の機械には4つの検査軸が含まれていましたが、Elmo ドライブを搭載した6つの軸をステージに統合する必要がありました。このステージは、機械の奥深く、ウェハーの近くにある非常に繊細な部品であるため、あらゆる小さなディテールを「エンジニアリング」し、長年にわたって稼働する機械の信頼性を確認することが極めて重要でした。

Motion control 解決
- Gold Whistleサーボドライブ
- Gold Maestroコントローラー

Gold Maestro
Advanced Ethercat, Multi- Axis Motion Controller

Gold Whistle
Miniature Servo Drive
20A/100VDC, 9A/200VDC
シックス Gold Whistleドライブは、カスタムPCBに緊密に統合され、ステージの可動部の内部、対応するモーターとエンコーダーのすぐ近くに取り付けられ、位相とエンコーダーのケーブルは最小限に短縮されました。すべてのドライブはEtherCATネットワークでElmoGold Maestroマスターコントローラに接続され、500μ秒のサイクルタイムでシステムを管理します。システムは、EtherCATネットワークに軸を追加してアドレスを割り当てるだけで、簡単に軸数を増やすことができます。ElmoGold Maestroは、非同期シーケンスを実行できる並列化されたプログラムを最大16個実行できます。 Gold Maestroがシーケンスを管理し、イベントを報告します。この非同期メカニズムを使用すると、ホストはシーケンス・ステータスのポーリングに時間を費やす必要がないため、ホスト・コンピュータの計算リソースを節約できます。
ドライブは常に振動や衝撃にさらされているため、そのような条件にも耐えられる防弾仕様の実績ある電子機器を使用することが極めて重要だった。ドライブの発熱は、モーター自体から発生する熱に比べてごくわずかであることが証明された。100ワットの機械的パワーごとにモーターは約10Wの熱を発生させるが、ドライブは99%の実証済みの効率により、わずか1Wしか発生させない。
ステージのメカニクスは、最終的に10nmの精度を達成する必要がありましたが、ステージのX,Y,Z,θ軸のどれもが100%まっすぐで、平らで、正確で、剛性がないことを考慮すると、これは容易なことではありませんでした。Elmo 、3Dエラー補正機能を導入しました。これは、ステージの不正確さを表すプリロードされたエラー補正テーブルに依存し、不正確さデータを考慮して自動的に位置決めを補正します。Elmo 環境には、これらの機械誤差を測定するための高度な自動化ツールが組み込まれており、使いやすいGUIを提供しています。
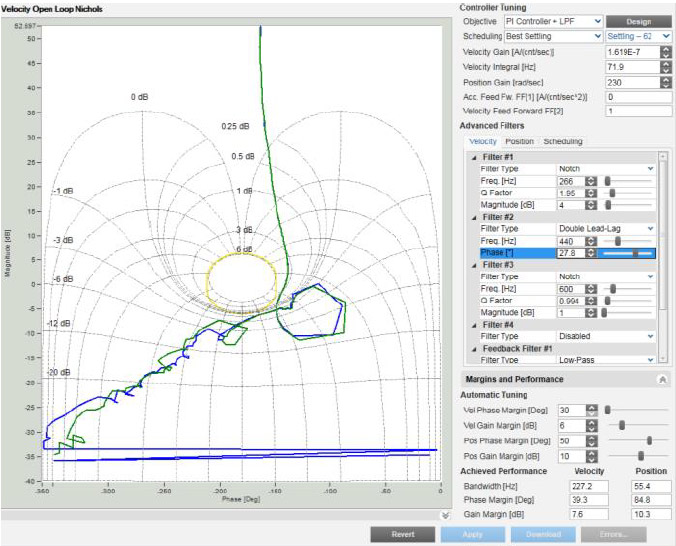
システム内の各エルモ・ゴールド・ドライブは、カスケード接続された位置-速度-電流の閉ループを最大20KHzのサイクル・レートで管理しています。強力なDSPは、10種類以上のインライン高次フィルターも管理しています:ローパス/ノッチ/アンチノッチ/バイ・クワッド/リード・ラグなど、あらゆる種類の高次フィルターを10個以上インラインで管理し、その一部は動作に応じて動的に変化します。セトリング時間を改善するために、非線形特殊アルゴリズムも実装されています。
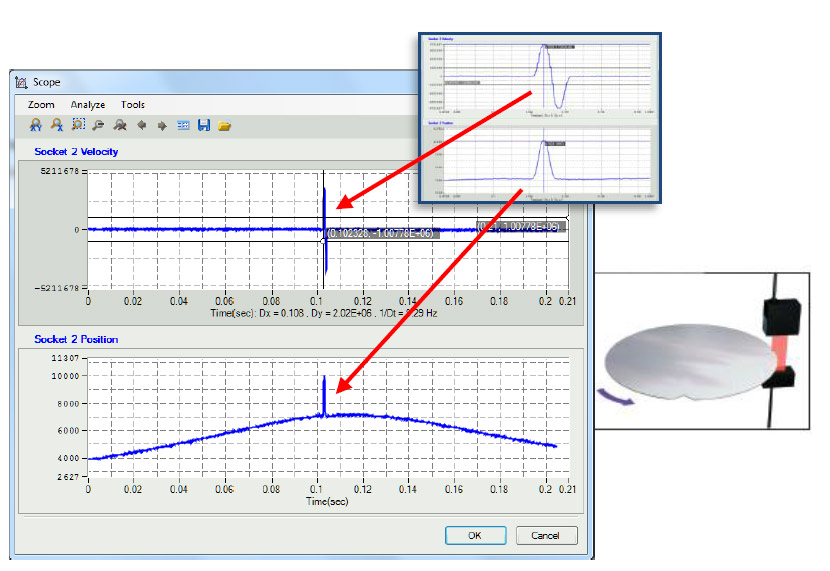
このドライブにはノッチファインダー機能が搭載されており、機械が新しく到着したウェハの向きを検索するシーケンスとなっている。タスクは、ノッチ(ウェーハエッジ上の特殊なVマーク)が専用センサーによって検出されるまでシータ軸を回転させ、その角度をホストに報告することである。このため、この単純なタスクは、ウェーハエッジのアナログ信号を20KHzのサンプリングレートでサンプリングし、最高回転速度でノッチマークを検出できる、ドライブの超低レベルで実行されている。
ウェハーの検査にはカメラも組み込まれています。すべての測定ポイントは、固定レンズを備えた高解像度、高倍率の光学カメラによってキャプチャされます。カメラのフォーカシングは、フォーカスセンシングハードウェアに従ってウェハを上下(ステージのZ軸)にわずかに動かすことで行われます。スループットを向上させるため、フォーカシング動作はXYステージが測定ポイント間を移動している間に行われ、ウェーハは既にフォーカシングされた状態で測定ターゲットに到達します。この機能には特別なHWインターフェースと特別なアルゴリズムが組み込まれているため、Elmo このアプリケーションのために特別にこのカスタム機能に投資しました。このようなカスタマイズ機能は、Elmo ゴールド・ドライブに内蔵された柔軟なFPGAにより、比較的容易に実装することができます。