サーボ動作の性質上、電源には特定の特性が要求される。ほとんどの場合、電源は単相または三相のACラインであり、「主電源に直接」または絶縁変圧器を介して供給されます。
サーボ動作には、信頼性が高く、シンプルで、最も重要なことは、「瞬間的な」大電力を供給でき、モーター(4象限)からの電力を「伝導」する電圧源が必要である。
さらに、電源は、電圧の不安定性、高スパイク、過渡現象、バースト、EMI、高い機械振動や機械的衝撃、極端な温度、高湿度といった「過酷な」動作環境に耐えなければならない。
サーボ・アプリケーションの電力消費動作には、瞬間的に高い電力ピークを必要とする加速や宣言が多く含まれるが、必要な平均電力は大幅に低い。
電源装置には、大きく分けて2つの "機能的サーボ "タスクがある:
1.サーボドライブの電源に必要な DC バス電圧を供給する。
2.モータと機械負荷からの回生/制動電力を「吸収」する。
サーボ電源の機能
- サーボシステムのニーズを満たすために必要な電圧を満たすように設計されたDCバスソースを作成する。
- 機械的負荷の瞬間的なピークと平均を駆動するのに十分な電力を供給できること。
- 適度な電圧安定性がある。必要な速度とトルクを達成するための最低電圧要件を満たすことだけを考えればよい。
- 電圧変動の制限と制御。サーボドライブの最大電圧制限を超えないようにしてください。
- 双方向のエネルギーフロー。サーボ動作では、電源が負荷に電力を供給し、負荷から電力を吸収できることが不可欠である。
- 高周波パワーハンドリング。サーボドライブの動作により、DCバスにPWM高周波電流が流れます。これらの電流は電源によって吸収され、適切にフィルタリングされなければなりません。
環境要件:
- 安全基準
- EMC、イミュニティ、エミッション
- 突入電流制御
- 環境要件(振動、温度、湿度など)への対応
上記を満たすには、サーボ用電源が必要である:
- 入力された交流電圧を直流バス電圧に整流する。
- サーボシステムからの継続的かつ瞬間的なピーク電力需要に対応する双方向「エネルギー・リザーバー」。
- 回生または制動時に負荷からエネルギーを吸収するための分流調整器。
- 突入電流リミッター。
- 高周波電流リップル "スワロワー"。
- サーボドライブからのEMI、およびサーボドライブへのEMIをフィルタリングします。
- ライン電圧過渡保護。
- 安全だ。

AC電源/ネットワークからサーボドライブに電力を供給する場合、2つの基本的なトポロジーがあります。
1.共有DC電源バス
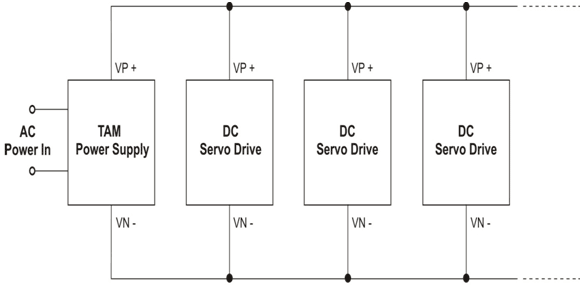
1つの電源で複数のサーボドライブを動作させ、1つのDCバスを共有します。
2.ACコモン電源バス
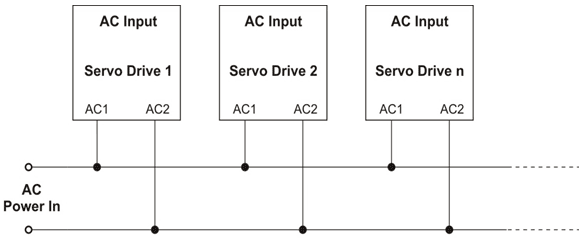
ACコモン・パワー・バスでは、各サーボ・ドライブはそれぞれ独立した電源を持っています。
リソース共有
サーボアプリケーションの電力消費動作には、瞬間的な高電力のピークを必要とする加速や宣言が多く含まれますが、必要な平均電力は大幅に低くなります。
ACコモンパワーバスでは、各サーボドライブの電源部は、必要なピーク電力を完全に供給するように設計されなければならず、その結果、より大きな電源が高い電気的ストレスにさらされることになります。共有DC電源バスの場合、瞬時(ピーク)消費電力の合計ははるかに低くなりますが、各サーボドライブで利用可能な電力リソースははるかに高くなり、全体的な消費量は低くなります。
再生 "シェアリング"
シェアードDCの大きな利点は、シャントレギュレータが共有されていることです。サーボの動作は、非常に短時間で急激なブレーキングや高速な方向転換を特徴とします。すべてのドライブが同時にDCバスにエネルギーを回生することはまれであるため、1つの共有シャントレギュレータで同時に数台のサーボドライブに対応できます。ACコモンでは、各ドライブはそれ自身でモータのエネルギー回生を吸収するのに十分な強力なシャント・レギュレータを持たなければなりません。
安全性、保護、EMIなど
安全規制では、主電源に接続される各負荷に、サーキットブレーカやコンタクタなどの必須の安全機能を持たせることが義務付けられています。
安全、コンタクタ、サーキットブレーカ
- シェアードDCでは、コンタクターやサーキットブレーカーなどは1セットしか必要ない。
- ACコモンでは、各ドライブに独立したEMIフィルタリング・ネットワークが必要です。
電磁妨害
- DCシェアードでは、電源内の1つのEMIネットワークがすべてのドライブに対応する。
- ACコモンでは、各ドライブに独立したEMIフィルタリング・ネットワークが必要です。
漏れ電流
- DCシェアードでは、重大なリークは電源でのみ発生する(リークは通常、EMIフィルタリング・ネットワークによって生じる)。
- ACコモンでは、各ドライブに大きなリーク電流があるため、トータルのリーク電流はより大きくなる。
突入電流の制限
- DCシェアードでは、電源に設置された1組のリミッターが複数のサーボドライブに対応している。
- ACコモンでは、各ドライブは突入リミッタを装備しなければならない。
上記のルールに従うことで、AC共用電源の「安全、保護、EMI」デバイスは二重になります。
実際、あまりにも多くのACコモンパワーバスの実装が安全規制を無視しているため、オペレーターとマシンが高いリスクにさらされている。
複数のサーボドライブへの1つのAC入力、1つのコンタクタ+サーキットブレーカの安全セット、1つのEMIフィルタリングネットワーク、1つの共通電流リーク源、1つの強力なシャントレギュレータ、複数のサーボドライブで共有される1つのDCバス:
共有DC電源バス
ACコモンの簡単な回路図
複数のAC入力、複数のコンタクター+サーキット・ブレーカーの安全セット、複数のEMIフィルター・ネットワーク、複数の漏れ電流源、複数の強力なシャント・レギュレーター、複数の個別のDCバス。

ACコモン電源バス

なぜDCシェアードなのか?
- DCバスを共有することで、各ドライブにより強力なDC電源が供給される
- より効率的で実用的な再生
- 消費電力を5%~8%節約
- 外部」必須部品の量を減らす
- スペースの削減(2軸以上のアプリケーションの場合)
- 放熱の低減
- ACネットワークからの「ストレス」を軽減
- 全体的なコストを削減(2軸以上のアプリケーションの場合)
典型的な「共有」DCバス・アプリケーション:3XGTRO+1XTAM

とはいえ、「ACコモン」は非常に一般的である:
ACコモンは実装が簡単である。各ドライブは独立して給電される。DC共有は、複数のサーボ・ドライブ・システムに電力を供給するために、もう少し設計上の考慮が必要です。
1台の電源で何台のドライブに給電できますか?
典型的な間違いは電流で数えることである:
Σ モータの電流 = 電源の電流
サーボアプリケーションでは、DCバスの電流は通常モータへの電流よりかなり低い。
電源の出力電力 = VAC*√2
例:
電源
- 電源の出力電力=連続20A、ピーク40A。
- 電源入力= 230VAC。
- 電源の出力電力 = 230*√2*20≈6500W
サーボモーター
- 公称トルク = 4.77NM
- 公称回転数 = 3000 RPM
- モーターの出力≒4.77 * 3000/ 10 ≒ 1400W
6500W」電源に「1400W」ドライブは何台?
6500/1400 = 4.6
経験則として、5台あるいは6台の「1400W」ドライブを1台の「6500W」電源で駆動することができる。
6500W」電源は、「2* 6500W」のピーク電力を容易に供給できる。
単相」からのサーボへの電源供給について一言
- ほとんどの場合(すべて)、「単相」はフェーズ-ニュートラル(120VAC、230VAC)である。
- ニュートラル/ZEROライン」は、ゼロ電流を流すことを「意図」している。これはソフト(高インピーダンス)電力線の一種である。
- 電力ネットワークは、ACラインの "どこか "で3相が均衡し、ゼロラインには電流が流れないと "仮定 "している。
- 経験則として、ZEROラインは相の定格電流の15%まで流すことができる。
単相負荷は、ゼロラインに対してアンバランスな電圧を引き起こす可能性があります。
これにより、「単相」電圧過渡現象、スパイク、サージ、サグなどが発生する可能性があります。
これは、ZEROラインに接続されるすべてのデバイスに当てはまります。
高すぎる電圧にさらされる機器もあれば、低すぎる電圧にさらされる機器もあります。
極端な場合、「単相」機器は故障するかもしれない。
これは中国やスイスでも起こっている。
しかし、単相は非常にポピュラーであり、費用対効果も高い。
単相電源から電力を供給するアプリケーションの場合、以下のことを確認してください:
- ZEROラインは35A-40A以上の電流を流さない。
- ゼロ・ラインは、現場とマシンにおいて適切なサイズでなければならない。
- ゼロラインは、サイトのAC電源インレットで適切に接地(PE)されていなければなりません。
- ゼロ線がシャーシ/グラウンド/PEに接続されているすべてのデバイスは、互いに「よく」ショートしている。

For a “High Power” single phase application the connections diagram could be employed, however, loading must then be balanced loading (ZERO Line current < 15%)
In servo applications, power consumption balancing is not very practical.

上記のトポロジーを使用した一部のアプリケーションでは、平衡負荷が保証されなかったため、「230VAC」の変動が300VACのピークさえ超えてしまった。極端なケースでは、アンバランスが故障の原因となった。
電圧リップル
- 3相の固有の電圧リップルは、キャパシタンスを問わず約15%です。
- 単相には100%のW/Oキャパシタンスの固有のリップルがある。
三相電圧はより剛性が高く、DCバスは負荷の影響を受けにくい。

単相
整流器へのストレスは3相の方がはるかに低い。

三相
適切なDCバスを作るために、単相は「巨大な」キャパシタンスを必要とする。
- これは、動的な機械的負荷に必要なパワーの要件を満たすのに十分であることはめったにない。
- これにより、ブリッジ・デバイスのストレス(RMS)と放熱が増加する(より高い定格のデバイスが必要)。
- これはACラインの汚染(EMI)を引き起こす。
- それでもなお、高電圧のサグが発生している
3つのフェーズがある:
- 主に高周波のPWM電流を扱うために必要な非常に低い静電容量を必要とする。
- 整流器へのストレスは著しく低い
- ボルテージ佐賀は15%以下
- ACラインのストレスとEMIが大幅に減少
では、なぜ常に3相を使用しないのでしょうか?
ほとんどの国では「3相」は3X400VAC、あるいは3X480VACである。
- サーボ性能の観点からは、このような高電圧での動作は必ずしも有益とは言えない。
- 400VACのドライブとモーターは230VACほど普及していないため、コストはかなり高く、種類も少ない。
- このような高電圧で安全規格に準拠するのはより困難である。
- 単相運転に制限されるアプリケーションもある(MRI)
米国と日本には、その両方にメリットをもたらす3X230がある:3相と230VAC
結論
3相の方が技術的に優れていることは言うまでもない
単相の方がはるかに "シンプル "でコスト効率も良い。
基本的なトポロジーは2つある:
- メイン電源に直接接続。絶縁トランスなし
- 電源入力は、絶縁トランスまたはSMPSを介してメイン電源から絶縁されています。
Elmo高電圧サーボ・ドライブとタンバリンpower supplies シリーズは、絶縁トランスなしで主電源に直接接続できるように設計されています。
低電圧サーボドライブは主電源からの絶縁が必要です。
Elmo こう定義する:
- VDC_BUS≦200VDC時の低電圧サーボドライブ
- VDC_BUS ≥ 400VDC 時の高電圧サーボドライブ
低電圧サーボ・ドライブのパワー・スイッチング・デバイスはMOSFETで、高電圧サーボ・ドライブはIGBTである。
主電源直結」の主な利点は以下の通りである:
- 絶縁トランスは不要。
- 電気設備はもっと簡単だ。
低電圧サーボドライブの利点:
- サーボ性能の向上
- PWM周波数が高い。広帯域幅、低電流リップルをもたらす。
- スイッチング遷移の高速化により、優れた直線性、広帯域幅、低損失、高出力電圧を実現
- 伝導」電圧が低いため、損失が少なく、出力電圧が高く、直線性が良い。
- EMIの大幅削減
- 大幅な高効率化
- サイズは比較にならないほど小さい!
- 安全な性病対策がはるかに容易
- コスト削減
低電圧の唯一の欠点は、絶縁トランスが必要なことである。
Elmo
- 高電圧サーボ・ドライブでは、制御部は電力部から絶縁されている。
- ほとんどの低電圧サーボドライブでは、制御部のコモンは内部でパワーリターン(直流電源のコモン)に接続されている。
低電圧ドライブ(非絶縁型)を使用する場合は、主電源から絶縁されたDCバス電源が必要です。
低電圧の主な欠点は変圧器が必要なことである。
この図は、最も単純な「すぐに使える」電源装置を示しています。

- 「すぐに使える」AC入力 絶縁された低電圧DC電源。
- 設置が必要なかさばる重い変圧器が不要
- 簡単な設置
- 小型
- 「完全に」保護されている
- リーズナブルで「競争力のある」コスト
しかし...。
SMPSは受動負荷に電力を「供給」するためだけに設計されています。
駆動モーター(サーボ)からの回生電力を吸収する機能はありません。回生時には、SMPS が損傷する可能性がある!
SMPSは、スパイクや過渡現象、サージ電圧を発生させる誘導負荷に対して非常に敏感です。極端な場合、SMPSが損傷する可能性があります!
回生時に電圧レギュレーションが不利になる可能性があります。回生/制動時、負荷は電力を電源に戻し、SMPSの端子電圧を「強制的に」上昇させます。端子電圧がSMPSの "設定電圧 "を超えると、クローズループが "ループ外 "に落ちる可能性がある。このとき、SMPS からの出力電圧はありません。"ノーパワー、ノーサーボ!"
ピーク電流/電力能力はありません。
SMPSは定格電力を連続的に供給するように設計されています。サーボ動作に重要なピーク電流を供給することはできません。

スタート」はとてもシンプルなようだが...。
直列フルパワーダイオード(回生をブロック)、反並列ダイオード(誘導負荷スパイクから保護)、外部追加容量(モーターから汲み上げられる負電流の少なくとも一部を吸収)、そしてまだピーク能力もブレーキ能力もない。
一部の(多すぎる)「低価格」SMPSには注意が必要である:

- 「古臭い」電子機器(「ローテク」製品であることを示す)
- 「お粗末な」仕上がり
- 部品の品質?"神は知っている"
- 工業環境には適さない
- 品質と信頼性に注意。将来的に問題が発生するかもしれない!
- そして、もう少し良いSMPSは、もっと高い......。
結論
- 300Wから400WまでのSMPSを必要とするアプリケーションでは、SMPSの方が良い選択となる可能性が非常に高い!
- SMPSの品質には細心の注意が必要である。
区別すべき2つの重要なケース
- 主電源に直接」接続される電源
- メイン "から絶縁された電源
メインへの直接接続」と「絶縁メイン」の簡易接続図

PRとVn-の違いに注意しなければならない。
どちらも整流ブリッジの最も負の電圧である。
絶縁メイン "接続では、PRはアースとシステム・リターン(グランド)に接続される。

ダイレクト・ツー・メイン」接続では、Vn-をアース、グランド、リターンに接続してはなりません。そのような接続は破壊的な故障の原因となります。

- TAMは、サーボ・アプリケーション用に設計されたElmo Power Supplies シリーズです。
- TAMシリーズは、この記事で取り上げたすべての要件を満たしている。

TAMは、サーボ・アプリケーション用に設計されたElmo Power Supplies シリーズです。
TAMシリーズは、この記事で説明するすべての要件を満たしています。
能力:
電源 | TAM-20/36VAC | TAM-20/60VAC | TAM-20/120VAC | TAM-20/230VAC | TAM-20/460VAC |
|---|---|---|---|---|---|
| 公称 入力 AC 電圧 | 1x36vac | 1x60vac | 1x120vac | 1x230vac | 1x460vac |
| ライン周波数 | 40 - 70 Hz | 40 - 70 Hz | 40 - 70 Hz | 40 - 70 Hz | 40 - 70 Hz |
| 最大 入力AC電圧 | 1x40vac (L-N) | 1x63vac (L-N) | 1x134vac (L-N) | 1x270vac (L-N) | 1x505vac (L-N) |
| 最大出力 | 1100W | 1800W | 3800W | 7600W | 14000W |
| 最大出力ピーク | 2200W | 3600W | 7600W | 15200W | 28000W |
| 公称DCバス出力 (公称AC電圧時) | 50VDC | 85VDC | 170VDC | 325VDC | 560VDC(400VAC 用) |
| シャント電力(ピーク) | 1.8KW | 4.5KW | 5.5KW | 6KW | 6.3KW |
| DC出力電流電流 | 20A | 20A | 20A | 20A | 20A |
| DC出力ピーク電流 | 40A | 40A | 40A | 40A | 40A |
| 相手ドライブ | XXX-YY/60年 | XXX-YY/100ドル | XXX-YY/200年 | XXX-YY/400 | XXX-YY/800 |
| 重量 | 1155 gr | 1155 gr | 1155 gr | 1155 gr | 1155 gr |
サイズの例:
動作電圧: 230VAC
例:モーターの公称出力:
- モーター1 = 2500W
- モーター2 = 1500W
- モーター3 = モーター4 = モーター5 = モーター6 = 800W
- Σモーター・ワット= 7200W
TAM-20/230VACから7200Wを供給しても大丈夫ですか?
- TAMの230VACでの出力は "わずか "6500W?
はい、大丈夫です。
経験則ですが、
多軸アプリケーションの場合、モータのΣWattsは「公称電圧でのTAM出力電力」+20%とすることができます。
どんなケーブルですか?
AC入力:
- 十分:STD電気ケーブル、バンドル
- 推奨より良いEMCのために、シールドされ、束ねられたものを使用してください。
ケーブル DC出力:
- 十分:STD電気
- 推奨(高度):EMCに対応するため、シールドケーブルとバンドルケーブルの使用はほぼ必須です。
なぜ必要なのか?
- 電流出力能力を高める
- シャント電力吸収能力を高める
2台のTAM20/XXXVACの並列運転
- 三相入力電圧の場合、出力電流は2倍になる:
TAM20+TAM20=TAM40(3相入力)。
- 単相入力電圧の場合
TAM20+TAM20=TAM32 =32A(単相入力)
単相、三相にかかわらず、2台のTAMを並列接続した場合、シャント電力吸収能力は2倍になります。
TAMを3台並列に?少しディレーティングすればうまくいくでしょう。
TAM100は、より経済的で効率的なソリューションです。

IEC61800は
バリアブルドライブ」に対する最も包括的な安全・EMC規格です。Elmo 、ULやその他の関連規格に加え、この規格を全製品に採用することを決定しました。

